能品汇

面议
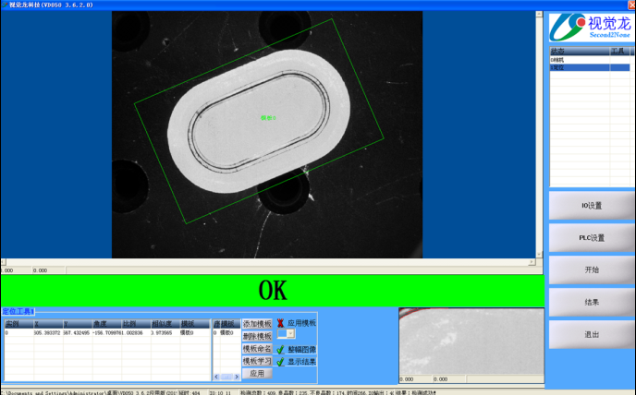
视觉龙VD200视觉定位系统—防爆片定位组装方案
深圳市视觉龙科技有限公司
广东深圳市 · 付款后3天内
该产品库存不足
项目需求:
1、区别防爆片正反面,具体如下图所示;
2、定位防爆片以及盖板的位置,对位精度要求0.02mm。
安装要求:防爆片物距不超过160mm,盖板物距在320mm—470mm之间

图一:正面

图二:反面
方案构像:
根据检测需求,初步定为三个动作完成对位安装。
**步:机械手从夹具上抓取样品;
第二步:运动机构携带样品,到相机指定的拍照点,相机拍照,计算出当前工件位置与标准位置偏差。
第三步:相机二拍照,软件处理图片,计算出当前盖板位置与标准位置偏差,将总的偏差( X Y θ)发送给运动机构进行位置纠偏贴合.
软件处理结果:


硬件选型:
500万工业相机 2个
工业镜头 2个
工业光源 2个
光源控制器 1个
视觉龙VD200视觉定位系统
- 发货:3天内
公司:深圳市视觉龙科技有限公司
姓名:尹女士(先生)
传真:0755-82545951
地区:广东-深圳市
地址:深圳市龙华新区民清路光辉科技园(富士康西二门)2号楼2单元603
邮编:518109
阿里旺旺:sjl123123